Hovering and landing a helicopter
Hovering a helicopter midair
Method:
Press the "STP" button on the EFIS
Result:
FSXPilot will bring the helicopter to a complete stop over ground. To achieve this
The GPS coordinate at which the "STP" button was pressed is stored
Speed mode is switched to "ground speed" mode. Anterior and lateral speeds are calculated without taking into account the wind.
FSXPilot continuously evaluates the anterior and lateral offset to the initial GPS position
The offsets are displayed on the EFIS
Hovering a helicopter at a specific GPS target
Method:
Press the "menu" button on the EFIS and select a GPS fix from the menu entry "Near GPS targets". This target could be a landmark or the GPS coordinate of a helipad.
If you have not already done so, you must define your GPS targets first before you can hover above them.
Immediately after selecting your GPS target, press the "menu" button on the EFIS again and select "Hover at ..."
Result:
FSXPilot will turn towards the GPS target and continue the approach with current speed.
The user can then alter the altitude setting. FSXPilot will continuously set the correct sink rate to reach the target at that altitude.
Speed mode is switched to "ground speed" mode. Anterior and lateral speeds are calculated without taking into account the wind.
Over the target, FSXPilot enters hover mode. The program continuously evaluates the anterior and lateral offset to the initial GPS position
The offsets are displayed on the EFIS
CAVEAT:
This method is intended for the use with helicopters only.
It is the responsibility of the pilot to choose a suitable altitude for hovering.
Currently, no crash checks (buildings, mountains) are done by FSXPilot.
Landing a helicopter on a specific GPS target
Method:
Press the "menu" button on the EFIS and select a GPS fix from the menu entry "Near GPS targets". This target could be a landmark or the GPS location of the lawn of your backyard or the GPS coordinate of a helipad.
If you have not already done so, you must define your GPS targets first before you can land on them.
Immediately after selecting your GPS target, press the "menu" button on the EFIS again and select "Land at ..."
Result:
FSXPilot will turn towards the GPS target and continue the approach with current speed.
Landing lights are switched on.
FSXPilot will adjust a suitable glide slope matching the final landing spot altitude.
The user should not alter this setting. FSXPilot will continuously set the correct sink rate to reach the target at 20 m above that altitude.
Speed mode is switched to "ground speed" mode. Anterior and lateral speeds are calculated without taking into account the wind.
Gear, if present, will be lowered in time.
20 m over the target, FSXPilot will reduce the speed of the helicopter and finally enter hover mode.
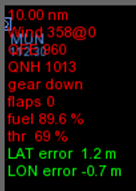
The program continuously evaluates the anterior and lateral offset to landing spot position, will display those offsets (red) on the EFIS and only land if offset are acceptable (green) for 10 seconds.
The function can be reliably used in bad weather conditions and zero vision.
CAVEAT:
This method is intended for the use with helicopters only.
Currently, no crash checks of the approach path (buildings, trees mountains) are done by FSXPilot. Use this function only if you have an unobstructed approach path to 20 m above your landing spot.
Using the function at very high wind speeds may result in inaccurate landing and, perhaps, in loss of life.
Created with the Personal Edition of HelpNDoc: Easily create Web Help sites